现有的Rust OS
axhal
Note
. ├── arch │ ├── aarch64 (arm相关:cortex-m-rt?) │ │ └── ... │ ├── loongarch64 │ │ └── ... │ ├── mod.rs │ ├── riscv (riscv-rt?) │ │ └── ... │ └── x86_64 │ └── ... ├── cpu.rs (core,核心相关) ├── irq.rs (中断相关) ├── lib.rs ├── mem.rs (物理内存管理) ├── paging.rs (内存分页相关) ├── platform │ └── ... (特定平台的实现) ├── time.rs ├── tls.rs (✖线程内存,应由multitask模块提供?) └── trap.rs (特权态相关)
embedded-hal
Note
main crate ├── delay.rs ├── digital.rs ├── i2c.rs ├── lib.rs ├── pwm.rs └── spi.rs non-blocking crate ├── lib.rs ├── serial.rs └── spi.rs async crate ├── delay.rs ├── digital.rs ├── i2c.rs ├── lib.rs └── spi.rs bus crate (提供bus的共享实现) ├── i2c │ ├── atomic.rs │ ├── critical_section.rs │ ├── mod.rs │ ├── mutex.rs │ ├── rc.rs │ └── refcell.rs ├── lib.rs ├── spi │ └── ... (大致同i2c) └── util.rs can crate (又单独拉出来了一个crate) ├── blocking.rs ├── id.rs ├── lib.rs └── nb.rs io crate (有两个,一个普通、一个async,文件夹结构相同) ├── impls │ ├── boxx.rs │ ├── mod.rs │ ├── slice_mut.rs │ ├── slice_ref.rs │ └── vec.rs └── lib.rs io-adapters crate (io-hal 的实现) ├── fmt.rs (对core::fmt::write的封装) ├── futures_03.rs (基于futures crate的实现) ├── lib.rs ├── std.rs (对std::read/write的封装) └── tokio_1.rs (tokio的实现)
HAL、devicetree or configuration file?
调度器
RTIC
- 硬件任务(由中断驱动)
- 软件任务(相同优先级的任务共享一个中断内部使用协程,通过中断优先级来保证任务优先级)
- 资源(挺有意思的,隐藏了一些资源共享的操作,可读性更强,更规整)
- local
- share
- 通道
- monotonics 带有timeout的任务,同优先级的任务还是会有实时性问题
embassy-preempt
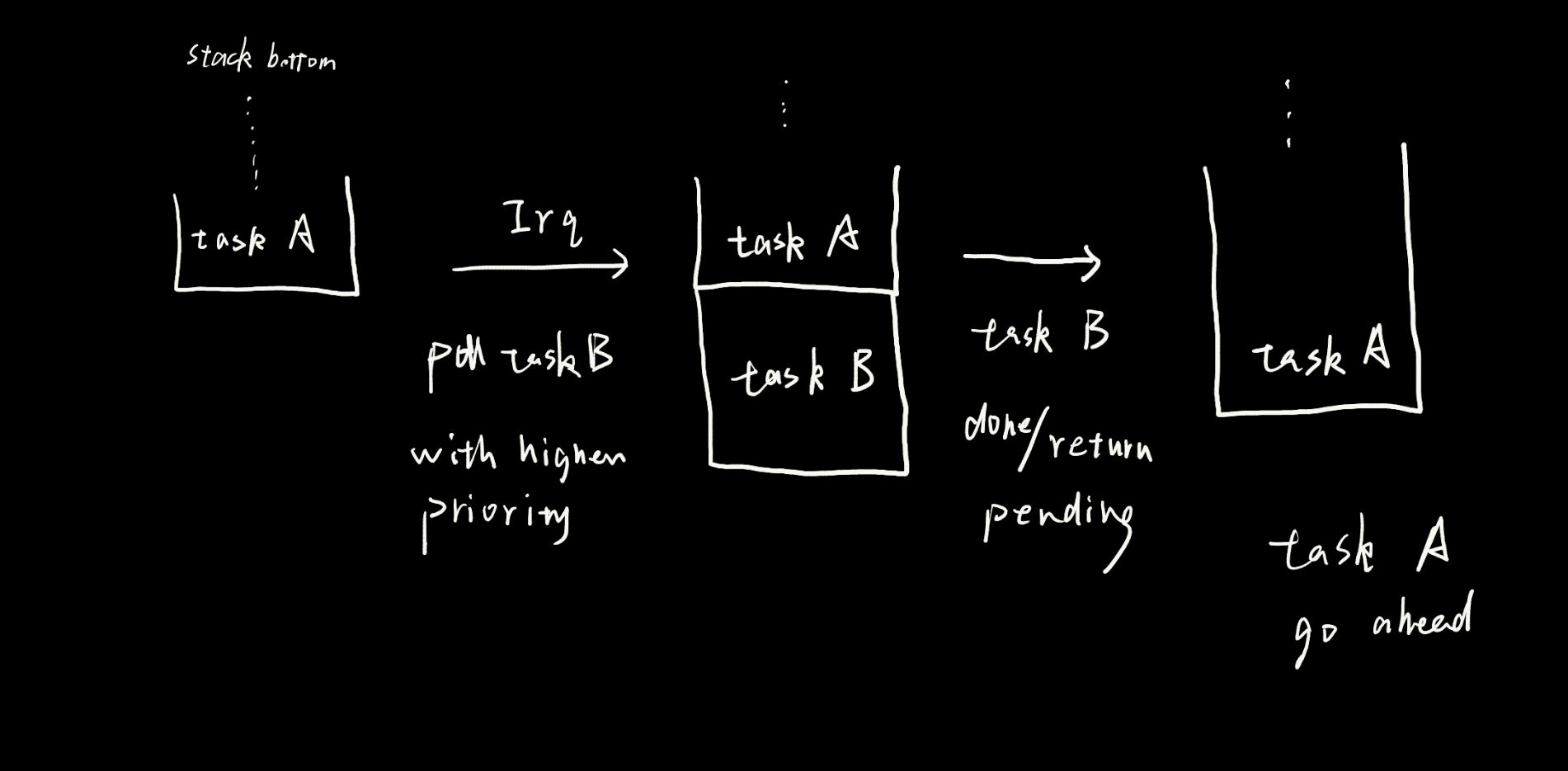
关于桟的一些思考 连续性?
如果只是实现FIFO以及高优先级直接抢占的话似乎不需要为每个单独的任务分配桟? 有意思的点在于通过pendsv似乎可以不再依赖有限的软中断
但是如果需要时间片相关的调度算法(RoundRobin, 各种CFS)还是需要将桟分开来?
ArielOS
粗略看下来更多强调了通过yml等提供的更灵活的可配置性